English
English
客户服务热线
13203730860(微信同号)
13203730860(微信同号)
联系人:侯经理
手 机:13203730860(微信同号)
电 话:400-653-6366
邮 箱:1574390615@qq.com
地 址:上海市浦东新区叠桥路456弄162号
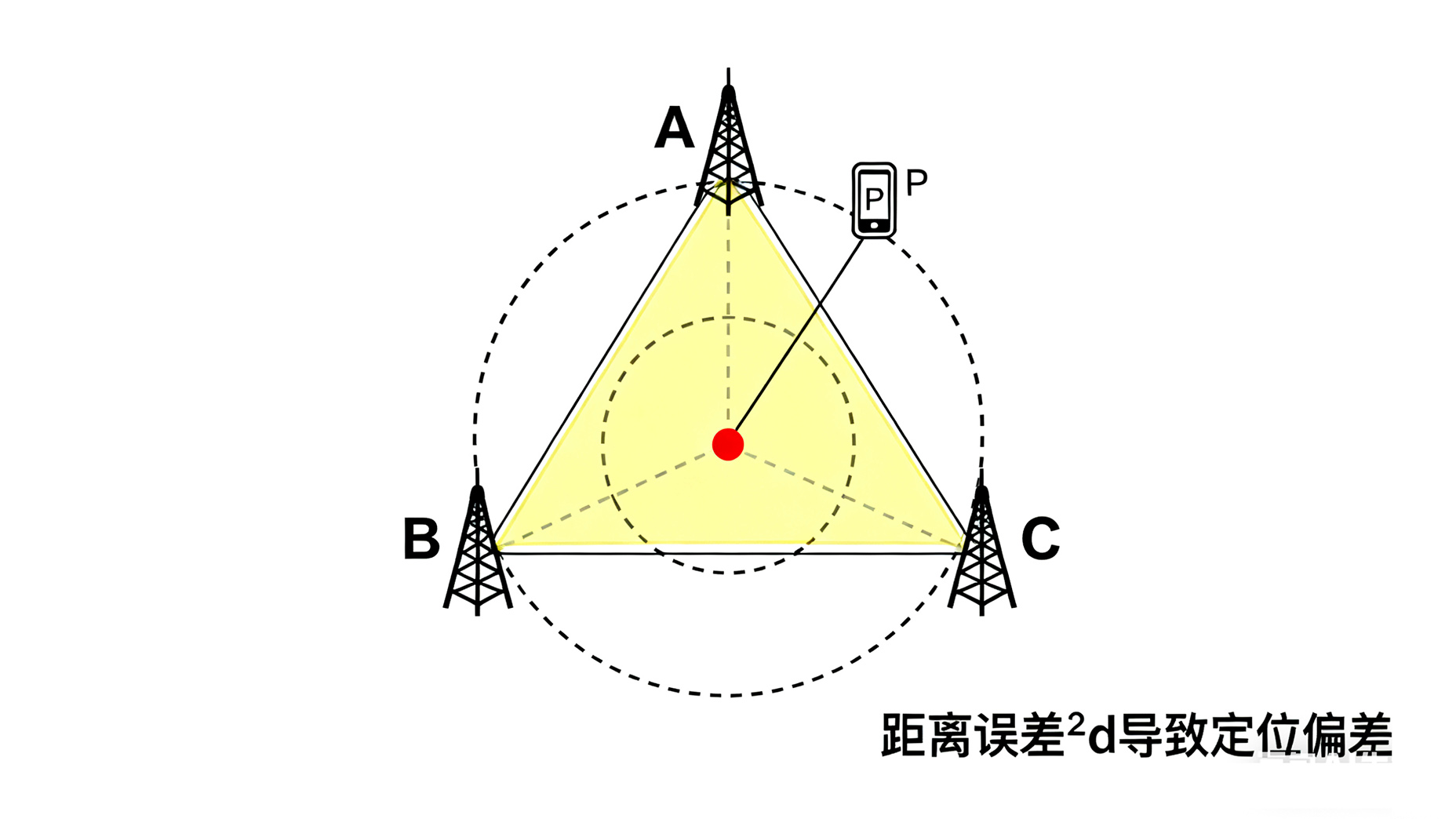
人员定位系统中常用的三角测量法是一种基于三角形几何原理的定位技术,其核心是通过测量目标点与至少两个已知参考点之间的角度关系,结合已知基线距离,利用三角函数(如正弦定理、余弦定理)计算目标点的坐标位置。以下是具体说明:
基线确定:
在定位区域内选定两个已知坐标的参考点(如基站或信标),测量它们之间的直线距离(基线长度)。
角度测量:
通过目标点(如人员佩戴的标签)向两个参考点发送信号,测量目标点与基线两端点形成的夹角(或方向角)。例如,使用方向天线或相位差技术确定角度。
几何解算:
根据基线长度和两个角度值,构建三角形并应用三角函数计算目标点的坐标。公式可能涉及:
室内定位:
在仓库、工厂等场景中,通过部署多个蓝牙信标(Beacon)或超宽带(UWB)基站,测量目标标签与基站的角度,结合基线距离实现厘米级定位。例如,UWB技术可通过时间差和角度信息将定位误差控制在2厘米内。
室外导航:
传统六分仪导航利用太阳或恒星与海平线的夹角,结合已知地理坐标(基线),通过三角测量确定船只位置。现代GPS虽主要依赖三边测量(距离交汇),但早期系统也曾采用角度交汇原理。
历史与军事应用:
16世纪地图制作者赫马·弗里修斯提出用三角测量定位远方地点以制作地图;17世纪荷兰数学家威理博·司乃耳通过测量33个三角形链接,计算地球周长。军事中,三角测量用于火炮定位或战场目标坐标解算。
三边测量(距离交汇):
通过测量目标点到三个已知点的距离(如GPS卫星信号传播时间计算距离),以三个圆(球面)的交点确定位置。二维定位需至少三个参考点,三维定位(如GPS)需四颗卫星以消除时间误差。
三角测量(角度交汇):
依赖角度测量,对仪器精度要求更高(如需精确测量微小时间差或方向角),但硬件成本可能低于三边测量。例如,BLE(蓝牙低能耗)三角定位需了解信标空间旋转,精度约0.5米,而三边测量精度约1-2米。

视觉三角测量:
如镜像视界公司的“厘米级三维定位系统”,通过多摄像头捕捉目标点视差,结合相机内外参矩阵和时空同步机制,实现亚厘米级动态定位。系统利用三角测量几何解算目标深度(公式:,其中为焦距,为基线长度,为视差),并融合卡尔曼滤波与LSTM轨迹预测器,支持行为分类和异常检测。
混合定位系统:
未来趋势是结合三角测量与三边测量,利用角度和距离信息提升精度与冗余度。例如,UWB技术通过超宽带信号实现厘米级定位,同时可融合角度数据优化结果。
你觉得这篇文章怎么样?
Copyright © 2002-202X 上海飞远光电信息技术有限公司 版权所有 备案号:沪ICP备19033256号-1
服务热线